Çizgi izleyen robot kodu:
#include <QTRSensors.h> //Qtr v4.0
#define AIN1 4 //A sağ motor.
#define AIN2 3
#define ENA 5
#define ENB 6 //B sol motor.
#define BIN1 7
#define BIN2 8
#define STBY 9
#define sensorSayisi 8
#define sensorOrnekSayisi 4
#define emiterPini 11
#define LED 13
int maxHiz = 70; // Motor pwm ayarı 0 - 255.
int hata = 0, turev = 0;
float KP = 0.03, KD = 0.5; // Oran (KP) ve türev (KD) sabitleri. (Her araca göre ayar yapılmalıdır.)
unsigned int pozisyon = 3500;
int fark = 0; // Motorlara uygulanan fark.
int sonHata; // Orantılı son değer. (Hatanın türevini hesaplamak için kullanılır.)
int hedef = 3500; // Sensörden gelen 0 - 7000 arası değerin orta noktası.
QTRSensors qtr; // qtr isimli nesne oluşturuldu.
unsigned int sensor[sensorSayisi];
void setup() {
qtr.setTypeAnalog(); //QTR-8A ayarla. (QTR-8RC için qtr.setTypeRC() fonksiyonu kullanılır.)
qtr.setSensorPins((const uint8_t[]) {
A0, A1, A2, A3, A4, A5, A6, A7
}, 8);
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(BIN1, OUTPUT);
pinMode(BIN2, OUTPUT);
pinMode(LED, OUTPUT);
pinMode(STBY, OUTPUT);
delay(1000); //Araca enerji verince 1sn bekle
kalibrasyon(1); // 0 elle, 1 otomatik kafa sallama.
}
void loop() {
sensorOku();
pd();
}
void sensorOku() {
pozisyon = qtr.readLineWhite(sensor); // Beyaz çizginin pozisyonunu oku. (0 - 7000)
hata = pozisyon - hedef; // Pozisyondan 3500 (hedef) çıkar. Hatayı bul.
qtr.read(sensor); // Sekiz sensörün ham değelerini oku.
}
void pd() {
turev = hata - sonHata; // Hatadan bir önceki hatayı çıkar.
sonHata = hata; // Şimdiki hatayı kaydet.
fark = ( hata * KP) + ( turev * KD ); // Motorlara uygulanacak farkı hesapla.
constrain(fark, -maxHiz, maxHiz); // fark en fazla maxHiz olsun.
if ( fark < 0 ) // fark negatif ise
motor(maxHiz, maxHiz + fark); // Sağ motorun hızını düşür.
else // fark negatif değilse
motor(maxHiz - fark, maxHiz); // Sol motorun hızını düşür.
}
void motor(int solMotorPWM, int sagMotorPWM) {
digitalWrite(STBY, HIGH);
if ( solMotorPWM >= 0 ) { // İleri.
digitalWrite(BIN1, HIGH);
digitalWrite(BIN2, LOW);
}
else { // Negatifse geri döndür.
digitalWrite(BIN1, LOW);
digitalWrite(BIN2, HIGH);
solMotorPWM *= -1;
}
analogWrite(ENB, solMotorPWM);
if ( sagMotorPWM >= 0 ) { // İleri.
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
}
else { // Negatifse geri döndür.
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
sagMotorPWM *= -1;
}
analogWrite(ENA, sagMotorPWM);
}
void kalibrasyon(bool secim) { // 1 otomatik, 0 elle.
if (secim) { // secim 1 ise otomatik kalibrasyon yap.
byte hiz = 40; // Aracın kafasını sallama hızı.
for (byte i = 0; i < 3; i++) { // Sağa sola üç kez kafa salla.
while (sensor[7] < 300) {
motor(hiz, -hiz);
qtr.calibrate();
sensorOku();
}
while (sensor[7] > 700) {
motor(hiz, -hiz);
qtr.calibrate();
sensorOku();
}
while (sensor[0] < 300) {
motor(-hiz, hiz);
qtr.calibrate();
sensorOku();
}
while (sensor[0] > 700) {
motor(-hiz, hiz);
qtr.calibrate();
sensorOku();
}
while (sensor[3] > 500) { // Ortada dur.
motor(hiz, -hiz);
qtr.calibrate();
sensorOku();
}
}
} else { // secim 0 ise elle kalibrasyon yap.
for ( byte i = 0; i < 70; i++) { // Dahili LED yanıp söndüğü sürece (3 sn) elle kalibrasyon yap.
digitalWrite(LED, HIGH); delay(20);
qtr.calibrate();
digitalWrite(LED, LOW); delay(20);
qtr.calibrate();
}
}
motor(0, 0);
delay(2000); // Kalbirasyondan sonra 3 sn bekle.
}
ÖNEMLİ UYARI! Yukarıdaki kod Qtr 3.0 kütüphane kodlarıdır. Arduino güncel kütüphanesi 4.0 dır. aşağıdaki kütüphaneyi yüklemezseniz hata verecektir.
qtr-sensors-arduino-3.0.0 kütüphane dosyası
QTR-8x datasheet
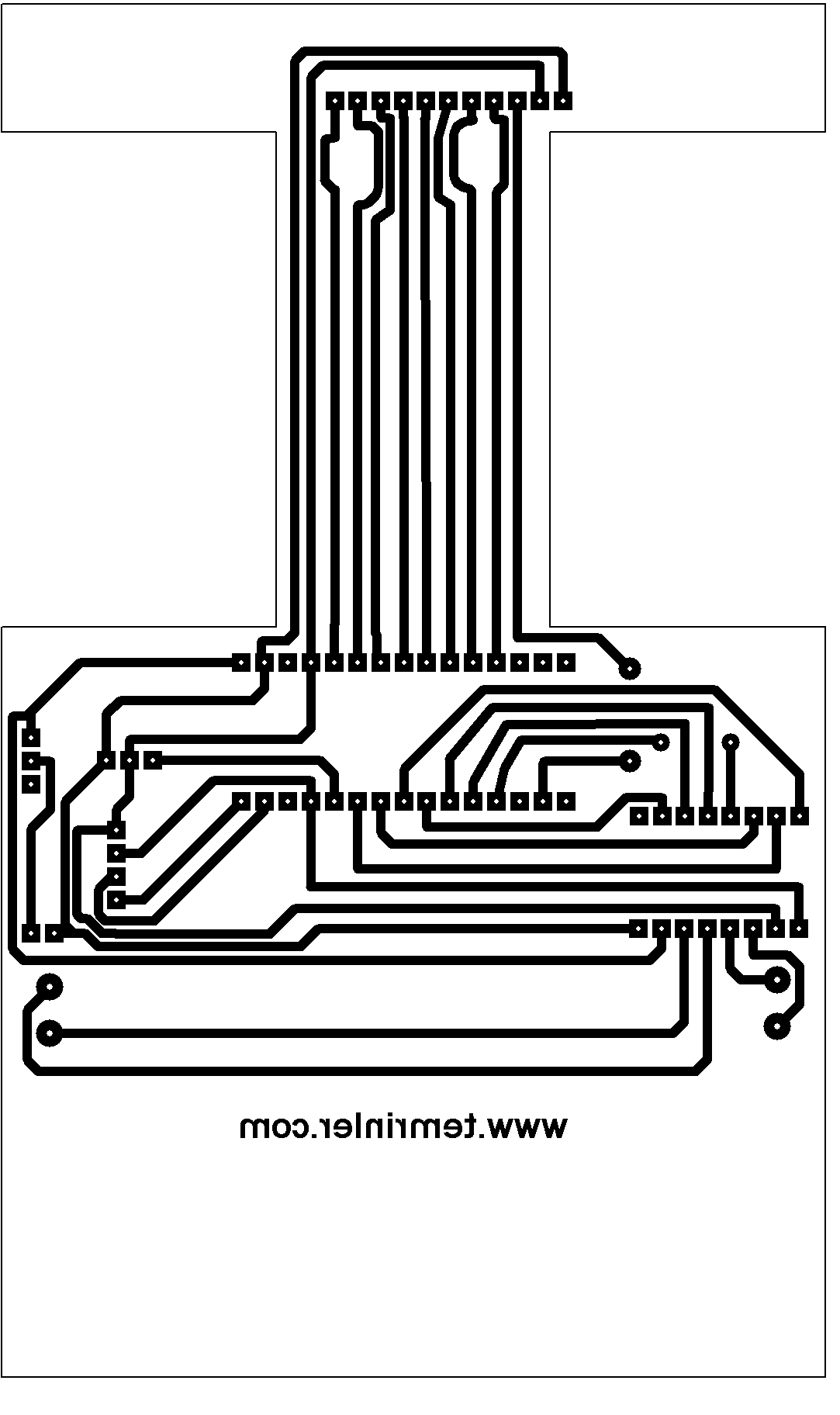
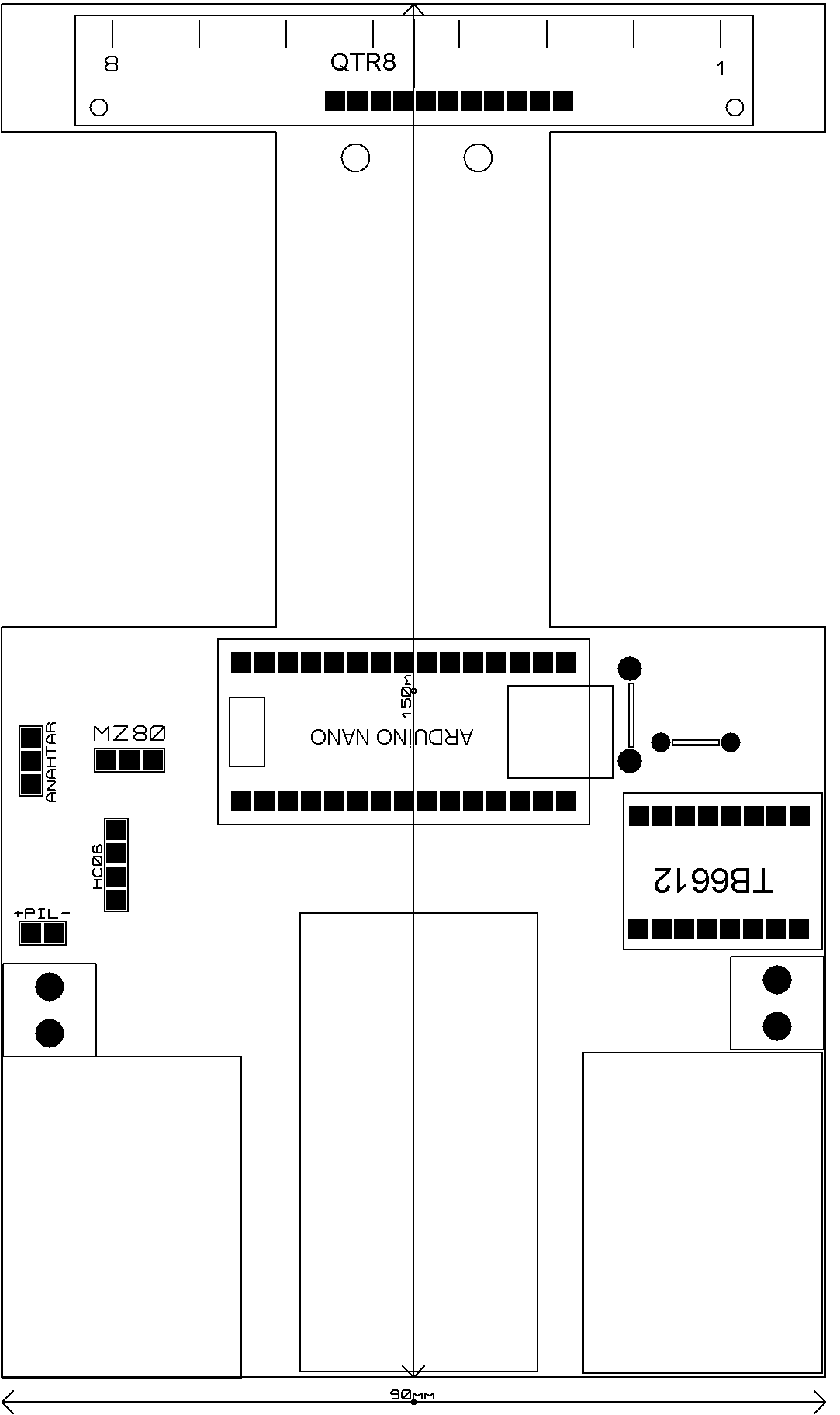
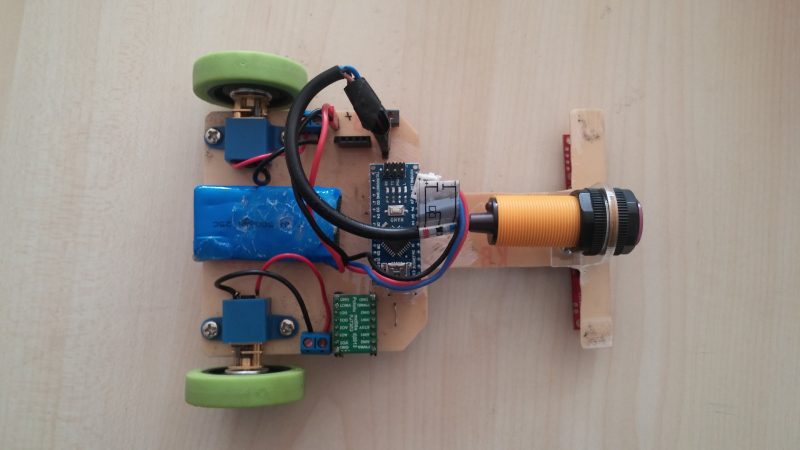
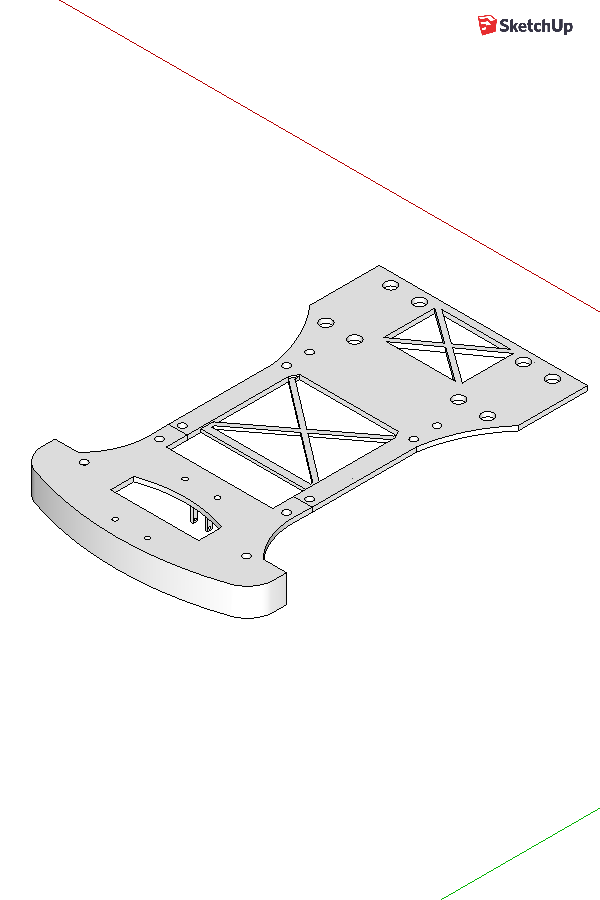
Hızlı Çizgi izleyen robot (PCB gövde)
araba_hizli proteus dosyası
L298N motor sürücü için fonksiyon
// BTS7960 (veya L298N) motor sürücü bağlantıları.
#define solRPWM 6 // Sol motor.
#define solLPWM 10 // Sol motor.
#define sagRPWM 5 // Sağ motor.
#define sagLPWM 9 // Sağ motor.
void motor(int solMotorPWM, int sagMotorPWM) {
if ( solMotorPWM >= 0 ) { // İleri.
analogWrite(solRPWM, solMotorPWM);
analogWrite(solLPWM, 0);
}
else { // Negatifse geri döndür.
analogWrite(solRPWM, 0);
analogWrite(solLPWM, abs(solMotorPWM));
}
if ( sagMotorPWM >= 0 ) { // İleri.
analogWrite(sagRPWM, sagMotorPWM);
analogWrite(sagLPWM, 0);
}
else { // Negatifse geri döndür.
analogWrite(sagRPWM, 0);
analogWrite(sagLPWM, abs(sagMotorPWM));
}
}
void ileri() {
motor(hiz, hiz);
}
void geri() {
motor(-hiz, -hiz);
}
void sol() {
motor(-hiz, hiz);
}
void sag() {
motor(hiz, -hiz);
}
void dur() {
motor(0, 0);
}
void ileriSol() {
motor(hiz / 2, hiz);
}
void ileriSag() {
motor(hiz, hiz / 2);
}
54 Responses
Merhaba Sketch uses 6324 bytes (20%) of program storage space. Maximum is 30720 bytes.
Global variables use 71 bytes (3%) of dynamic memory, leaving 1977 bytes for local variables. Maximum is 2048 bytes.
avrdude: ser_open(): can’t set com-state for “\\.\COM4”
Failed uploading: uploading error: exit status 1 böyle bir hata alıyoruz neden olabilir acaba ?
bilgisayar mikrodenetleyiciyle haberleşemiyor. sürücü problemli. sürücüyü kaldırın, tekrar yükleyin, tekrar deneyin.
yardım lütfen
l293 shild sürücü ve 6 sensör kullanarak kodları bir türlü uyarlayamadım yardımlarınızı bekliyorum
murat bey l293 e uyarlayabildinizmi
Kodu sona ekledim.
http://www.temrinler.com/?p=4148
murat bey l293 e uyarlayabildinizmi
Aşağıdaki fonksiyonu kullanabilirsiniz.
// BTS7960 (veya L298N) motor sürücü bağlantıları.
#define solRPWM 6 // Sol motor.
#define solLPWM 10 // Sol motor.
#define sagRPWM 5 // Sağ motor.
#define sagLPWM 9 // Sağ motor.
void motor(int solMotorPWM, int sagMotorPWM) {
if ( solMotorPWM >= 0 ) { // İleri.
analogWrite(solRPWM, solMotorPWM);
analogWrite(solLPWM, 0);
}
else { // Negatifse geri döndür.
analogWrite(solRPWM, 0);
analogWrite(solLPWM, abs(solMotorPWM));
}
if ( sagMotorPWM >= 0 ) { // İleri.
analogWrite(sagRPWM, sagMotorPWM);
analogWrite(sagLPWM, 0);
}
else { // Negatifse geri döndür.
analogWrite(sagRPWM, 0);
analogWrite(sagLPWM, abs(sagMotorPWM));
}
}
void ileri() {
motor(hiz, hiz);
}
void geri() {
motor(-hiz, -hiz);
}
void sol() {
motor(-hiz, hiz);
}
void sag() {
motor(hiz, -hiz);
}
void dur() {
motor(0, 0);
}
void ileriSol() {
motor(hiz / 2, hiz);
}
void ileriSag() {
motor(hiz, hiz / 2);
}
merhaba sayenizde çok şey öğrendim teşekkürler.
Şimdi l293d shield kullanarak robot yaptım ancak bir türlü kodlarınız uyarlayamadım yardımcı olursanız çok sevinirim kolay gelsin
iyi günler pcb kartın boyutu ne kadardır acaba
Merhaba, 6cmx6cm
Hocam motor tanımlanmadı diyor ne yapmalıyız.Teşekkürler
Ekran görüntüsü gönderebilir misiniz.
elinize sağlık pcb nin şematiğini paylaşabilirmisiniz ?
proteus dosyası yazıda nevcut.
Kapsamlı videonuzu haziran sonu gibi yayınlayacaktınız ne zaman yayınlayacaksınız kolay gelsin.
Merhaba hocam size bir bilgi danışmak istiyorum, yaptığım bir projede hem sd kart modülü (wav uzantılı müzik çalacak) hem de servo motor kullanmam gerekiyor. Fakat ile kütüphaneleri çakışıyor, hata veriyor. VE kütüphaneleri ile de denedim istediğim yerlerde istediğim müzik çalmıyor. Yardımcı olursanız sevinirim.
merhaba,
qtr8a sensorun 6 pın kodunu nerden bulabılırım..
cok acele lazım da bana
Ardinyo dosya örnekler qtr içinden bulabilirsin
Öncelikle paylaşımınız çok güzel , çok yardımcı oldu, emeğinize sağlık. Söylediğiniz daha kapsamlı videonuzu ne zaman yayınlayacaksınız hayırlı geceler.
Merhaba. Rica ederim. Şu aralar çok yoğunum. haziran sonu gibi yayımlamayı planlıyorum.
Merhaba qtr 8 a sensör kullanıyoruz aurdino uno kullandığımızdan dolayı 6 tane analog çıkış kullanıyoruz tek tekeri dönüyor sadece bunu sebebi ne olabilir aceba?
Sensörden çok motor sürücü problemi gibi görünüyor. Kodu veya kablorı kotrol edin motor sürücüde.
Ustam emeğine sağlık. Çok güzel bir paylaşım. AIN1-AIN2-BIN1-BIN2 pinlerini motor dönüş yönü için kullanıyorsun sanırım. Sadece AIN1 ve BIN1 kullanamazmıyız..
Teşekkürler. Evet. Kullanabilirsiniz. Bu haliyle de aynı işlevi görür.
Öncelikle iyi günler. Kodu yüklediğimde aşağıda belirttiğim kodu işaret edip “expected identifier before numeric constant” diye bir hata alıyorum. Bunu düzeltmek için ne yapmalıyım?
} while((sensor([3])<200)||(sensor([4])<200));//çizgi dışında olduğun sürece dön
kopyala yapıştır nedenli olabilir. kod penceresinin sağ üst köşesindeki open code ‘un sağındaki download skecth butonuna basın veya mail adresinizi yazın .ino dosyasını göndereyim.
Bana .ino dosyasını gönderebilir misiniz?
ronaldokdt@hotmail.com
Kodun download tuşuna basarsanız .ino dosyasını indirmiş olursunuz.
hocam en kısa zamanda bir sumo calışmasıda bekliyorum.. harika anlatım.. allah razı olsun
İyi günler kodda yazdığınız STBY değeri nedir?
teşekkürler
stby 0 yapıldığında pololu tb6612fng motor sürücüsünü pasif bırakır. şuan kodda işlevi yok. kaldırılabilir.
STBY yi nasıl kaldırcaz? motorların çalışması için gerekli değil mi sonuçta?
Şöyleki bu devrede stby ucu kullanılmak için tasarlanmış. ama farklı bir tasarımda motor sürücünün STBy ucunu 5 volta verirsek yazılımda bunu kullanmak zorunda da kalmayız
Merhabalar , verdiğiniz kod ile qtr8a ve 1000 rpm motor kullanarak bir çizgi izleyen robot geliştirdim . Ancak bu robot 90 derecelik dönüşleri alamıyor. hızını biraz düşürüp (bahsettiğim değer 45 civarında ) denediğimde ise yumuşak dönüşleri alıp 90 derece olanları zorlanarak bazen geçiyor bazen geçmiyor.
Sizce sıkıntı nerededir ?
Kp&Kd değerlerini değiştirmeyi denedim ancak sağlıklı sonuçlar alamadım , değerleri denerken nasıl bir yol izlemeliyim ?
18*14cm bir robot için nasıl Kp&Kd değerleri atamalıyım ?
Yukarıdaki kod hızlı çizgi izleyende ve basit dönüşlerde işe yarar. Ancak 90 derecelik ve üstü açılarda farklı komutlar ilave etmek gerekir. Onun videosunu hazırlamadım. Bağlantıdaki kod işinizi görecektir. https://create.arduino.cc/editor/muratsasal/e0023d97-cc33-4aa5-b8cb-41c4a5625349/preview
verdiğiniz bu linkteki de hata verdi.
” “kontrolBiti” wasnt declared in this scope”
Düzelttim. Tekrar deneyin.
tekrar denedim fakat kafasına göre hareket ediyor robot. neden kaynaklanabilir? kp-kd değerleriyle de oynadım ama pek değişmiyor gibi.
bunu dener misiniz.
https://create.arduino.cc/editor/muratsasal/e53de983-b6f3-4206-8afb-523efd6b81d1/preview
son verdiğinizi de denedim. önceki hiç çalışmıyordu ama bu daha iyi tabi ufak tefek değişiklikler yaparak. ben 6 sensör kullanıyorum. uno da 6 adet anolog çıkış var diğer 2 sini nasıl bağlayabilirim? bir de bu son denediğim kodda sanki ortadaki 2 sensör işlevsiz gibi devamlı sağ ya da sol motor çalışıyor tekler gibi gidiyor. devamlı sağa ya da sola ata ata gidiyor yani. normal yolunda hızlanıp gitmiyor hiç. çoğu yeriyle oynadım. bu 2 sorumu cevaplarsanız çok sevinirim.
Uno da 6 analog giris oldugundan 6 adet sensör kullanabilirsiniz. Sağa sola kafa atmasının titremesinin sebebi kp kd degerlerinin büyük gelmesidir. Kucultun.
merhabalar tekrar :)sizin kodlar üzerinde çalışıyorum ama tam olarak oturmadı sanki. son verdiğiniz kodlara göre birkaç sorum olacak.
1- verdiğiniz kodlardaki en keskin dönüş 90 derece diye anlıyorum doğru mu acaba? Mesela Z tarzındaki dönüşlerde sıkıntı oluyor gibi? yoksa ben mi yanlış yapıyorum birşeyleri? 🙂
2- daha önceden hiç bilmediğimiz(ölçülerini vs vs gibi) bi pistte sorunsuz çalışması için hızını ister istemez düşük tutmamız gerekir sanırım değil mi? başka nelere dikkat etmeli?
Merhaba,
1. Evet Z leri dönebilecek komut şu
https://create.arduino.cc/editor/muratsasal/e0023d97-cc33-4aa5-b8cb-41c4a5625349/preview
2. evet hizi düşük tutmak gerekir 90 dereceler olduğu için. hızlanma komutları da ayrıca gönderirim. ya da uzak mesafe sensörü var o da kullanılabilir waveshare
Z leri dönebilecek komut ile diğerini birleştirmemiz mi gerekiyor o zaman? yani hem normal hem 90 hem de z gibi dönüşler için. yani amacım hiç bilmeden koyduğum pisti sonuna kadar tamamlatmak. 🙂
ayrıca hızlanma komutlarını da gönderirim demişsin yapisti bilmeden nerde hızlanıp yavaşlayacağımız biraz zor olur sanırım değil mi?
Bu arada çok teşekkürler cevaplar için.
son gönderdiğim kod aslında tüm dönüşleri yapar. pisti bilinmeyen yerde hızlanmak için tek çare uzun mesafe renk sensörü.ancak garip açılı boşlukları olan pistlerde özel kod yazmadan geçmek imkansız tabii ki
Kodun doğru olduğuna emin misiniz
Kendi aracımda bu kodu kullanıyorum.
Merhaba bu kodu kullanarak robot yaptım fakat çalışmıyor yardımcı olun
Arduino bir hata veriyorsa resmini muratsasal@gmail.com a gönderin onun dışında teknik bir sorununuz varsa yazın yardımcı olmaya çalışayım.
merhaba elin koluna saglik harika olus.
islerinizden basarilar dilerim
Teşekkürler.
Merhaba, ben bu kodu L298N ile uyumlu olacak hale getirdim fakat kod çalışmadı. Sensör değer veriyor fakat motorlar çalışmıyor. Yardımcı olur musunuz? Kod bu:
#include
const int enA = 10; //L298N
const int enB = 5;
const int in1 = 9; //motor a (sol)
const int in2 = 8; //motor a (sol)
const int in3 = 7; //motor b (sağ)
const int in4 = 6; //motor b (sağ)
#define NUM_SENSORS 6
#define TIMEOUT 4
#define EMITTER_PIN 2
#define LED 13
#define MZ80 4
int maxhiz = 70;
boolean zemin = 0; //1 siyah 0 beyaz
//PD’yi kullanmak için değişkenleri bildirme (her araca göre ayar yapılmalı)
int hata = 0; float KP = 0.01; // hata (her araca göre ayar yapılmalı)
int turev = 0; float KD = 0.1; // turev
unsigned int pozisyon = 0;
int fark = 0; // motorlara uygulanan fark
int son_hata; // Orantılı son değer (hatanın türevini hesaplamak için kullanılır)
int hedef = 3500;
QTRSensorsAnalog qtra((unsigned char[]) {
0, 1, 2, 3, 4, 5
} , NUM_SENSORS, TIMEOUT, EMITTER_PIN);
unsigned int sensor[NUM_SENSORS];
void setup()
{
pinMode(in1 , OUTPUT);
pinMode(in2 , OUTPUT);
pinMode(enA , OUTPUT);
pinMode(in3 , OUTPUT);
pinMode(in4 , OUTPUT);
pinMode(enB , OUTPUT);
pinMode(LED , OUTPUT);
pinMode(MZ80 , INPUT);
// Dahili Led yanıp söndüğü sürece (3sn) Elle Kalibrasyon yap
for ( int i = 0; i maxhiz ) fark = maxhiz;
else if ( fark < -maxhiz ) fark = -maxhiz;
( fark = 0 )
{
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
}
else
{
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
deger *= -1;
}
analogWrite(enA, deger);
}
void solmotor(int deger)
{
if ( deger >= 0 )
{
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
}
else
{
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
deger *= -1;
}
analogWrite(enB, deger);
}
void motor(int sol, int sag)
{
solmotor(sol);
sagmotor(sag);
}
Herhangi bir değişiklik yapmadan l298n motor sürücü ile de kullanabilirsin kodu.
Senin buraya yazdıgin kodda loop fonksiyonu ve pek çok şey eksik.
6 sensör kullandın hedef 3500 olmaz 2500olur. ( Sensör sayısı-1)*1000 /2
Her sensör beyazda 0 a yakın siyahta 1000e yakın değer verir