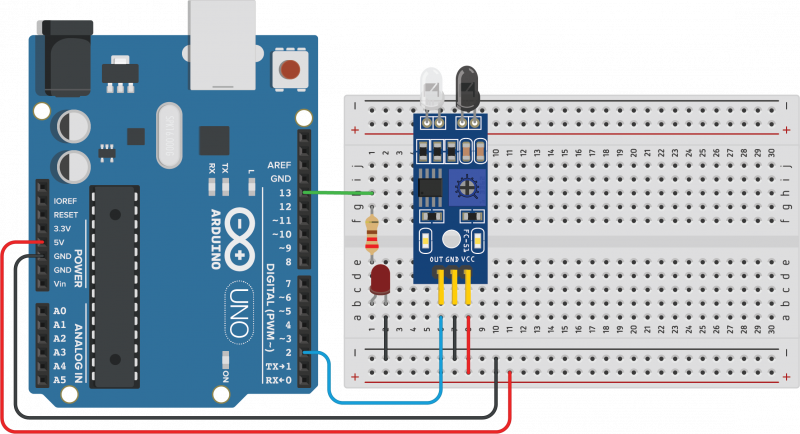
Görseldeki yaklaşım sensörü modülü ve pin yapısı görülmektedir. Sensör modülü bir çift IR alıcı verici LED’e sahiptir. Verici LED kızılötesi frekansta ışık verir. 2 cm-35 cm aralığında bulunan engelin yüzeyine çarpıp yansıyan ışık alıcı sensör tarafından okunur. Dijital çıkış veren modül üzerindeki yeşil ışık yanar ve dijital çıkıştan da LOW (lojik 0) okunur. Algılama uzaklığı potansiyometre ile ayarlanır. Siyah yüzey en düşük algılama mesafesini sağlarken beyaz yüzeyse en uzak algılama mesafesine izin vermektedir. Objenin büyüklüğü, konumu, sensöre göre açısı algılamayı etkileyen diğer değişkenlerdir. Görseldeki devre yaklaşım sensörüne bir cisim yaklaştığında LED’le uyarı verir.
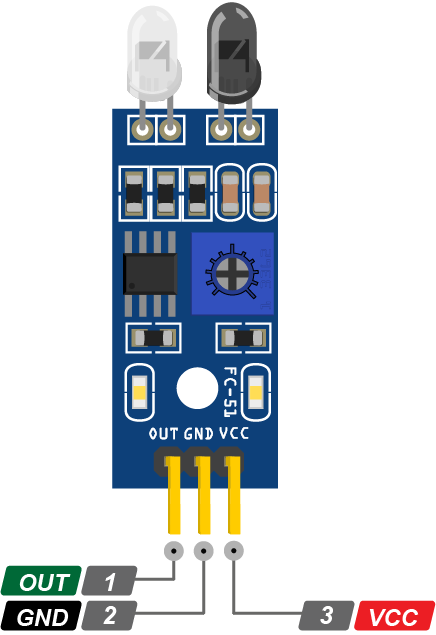
VCC: 5 V besleme.
GND: Toprak pini.
OUT: Dijital veri çıkışı.
const byte IR = 2, LED = 13;
void setup() {
pinMode(IR, INPUT);
pinMode(LED, OUTPUT);
}
void loop() {
bool IRdurum = digitalRead(IR); // Cisim yok lojik 1, cisim var lojik 0.
if (IRdurum == 0) // Cisim algılandıysa...
digitalWrite(LED, HIGH);
else digitalWrite(LED, LOW);
}
#include <Servo.h>
Servo servo; // servo isimli nesne oluşturuldu.
const byte IR = 2, LED = 13;
void setup() {
servo.attach(9); // Servo motor 9 numaralı PWM çıkışına bağlı.
pinMode(IR, INPUT);
}
void loop() {
bool IRdurum = digitalRead(IR); // Cisim yok lojik 1, cisim var lojik 0.
if (IRdurum == 0) { // Cisim algılandıysa...
servo.write(90); // Servo motorun gideceği derece.
delay(15);
}
else {
servo.write(0); // Servo motorun gideceği derece.
delay(15);
}
}
No responses yet