Kodlar:
//Yasin Demir (Shield/Kodu)
#include <Servo.h>
Servo motor;
String data;
const int trig=6;
const int echo=7;
int mesafe; //Pinler arduinoya tanıtıldı.
int sure;
int role6=11;
int role5=12;
int buzzer=10;
int led_3=8;
int led_2=9;
int led_1=5;
int servo=4;
void setup() {
motor.attach(servo);
pinMode(servo,OUTPUT); //motor 4 nolu pine bağlı
pinMode(trig , OUTPUT);
pinMode(echo , INPUT);
pinMode(led_1,OUTPUT);
pinMode(led_2,OUTPUT);
pinMode(led_3,OUTPUT);
pinMode(buzzer,OUTPUT);digitalWrite(led_1,LOW);
digitalWrite(led_2,LOW);
digitalWrite(led_3,LOW);
digitalWrite(buzzer,LOW);
Serial.begin(9600);
}
void loop() {
digitalWrite(trig,1);
delay(1000); //burada mesafe sensörünün 2 yerıinden birine 1(+5v) 1sn’ye aralıklarla gidecek.
digitalWrite(trig,0);sure=pulseIn(echo,HIGH); //sure diye değişkenin içine Hcrs-04 ün içindekiler yazılır.
mesafe=(sure/2)/29.1;Serial.print(“mesafe=”);
Serial.println(mesafe);if(mesafe<=10){
digitalWrite(led_1,1);
digitalWrite(buzzer,1);
delay(50);
digitalWrite(led_1,0);
digitalWrite(buzzer,0);
delay(50);
}
else if(mesafe<=20){
digitalWrite(led_1,1);
digitalWrite(buzzer,1);
delay(125);
digitalWrite(led_1,0);
digitalWrite(buzzer,0);
delay(125);
}
else if(mesafe<=15){
digitalWrite(led_1,1);
digitalWrite(buzzer,1);
delay(90);
digitalWrite(led_1,0);
digitalWrite(buzzer,0);
delay(90);
}
else if(mesafe<=5){
digitalWrite(buzzer,1);
delay(50);
digitalWrite(led_1,1);
delay(15);
digitalWrite(led_1,0);
delay(15);
}
else if(mesafe<=3){
digitalWrite(buzzer,1);
digitalWrite(led_1,1);
delay(10);
digitalWrite(led_1,0);
delay(10);
}
else{
digitalWrite(buzzer,0);
digitalWrite(led_1,0);
}while(Serial.available())
{
delay(10);
data += char(Serial.read());
}
if(data.length() >0) {
Serial.println(data);if(data == “led1_kapa”) {digitalWrite(led_1,LOW);}
if(data == “led1_ac”) {digitalWrite(led_1,HIGH);}if(data == “led1_kapa”) {digitalWrite(led_2,LOW);}
if(data == “led1_ac”) {digitalWrite(led_2,HIGH);}if(data == “led1_kapa”) {digitalWrite(led_3,LOW);}
if(data == “led1_ac”) {digitalWrite(led_3,HIGH);}if(data == “buzzer_ac”) {digitalWrite(buzzer,LOW);}
if(data == “buzzer_kapa”) {digitalWrite(buzzer,HIGH);}if(data == “servo”){
motor.write(180);
}
if(data == “servo”) {
motor.write(0);
}
if(data == “hepsi_ac”){
digitalWrite(led_1,HIGH);
digitalWrite(led_2,HIGH);
digitalWrite(led_3,HIGH);
digitalWrite(buzzer,HIGH);}if(data == “hepsi_kapat”){
digitalWrite(led_1,LOW);
digitalWrite(led_2,LOW);
digitalWrite(led_3,LOW);
digitalWrite(buzzer,LOW);}
data = “”;
}
}
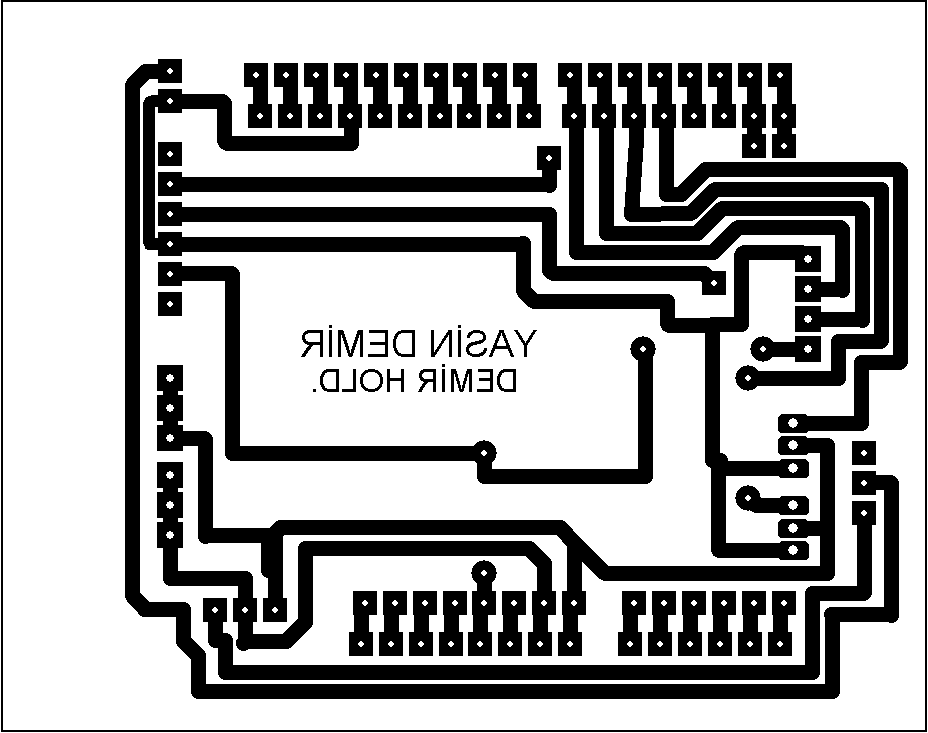
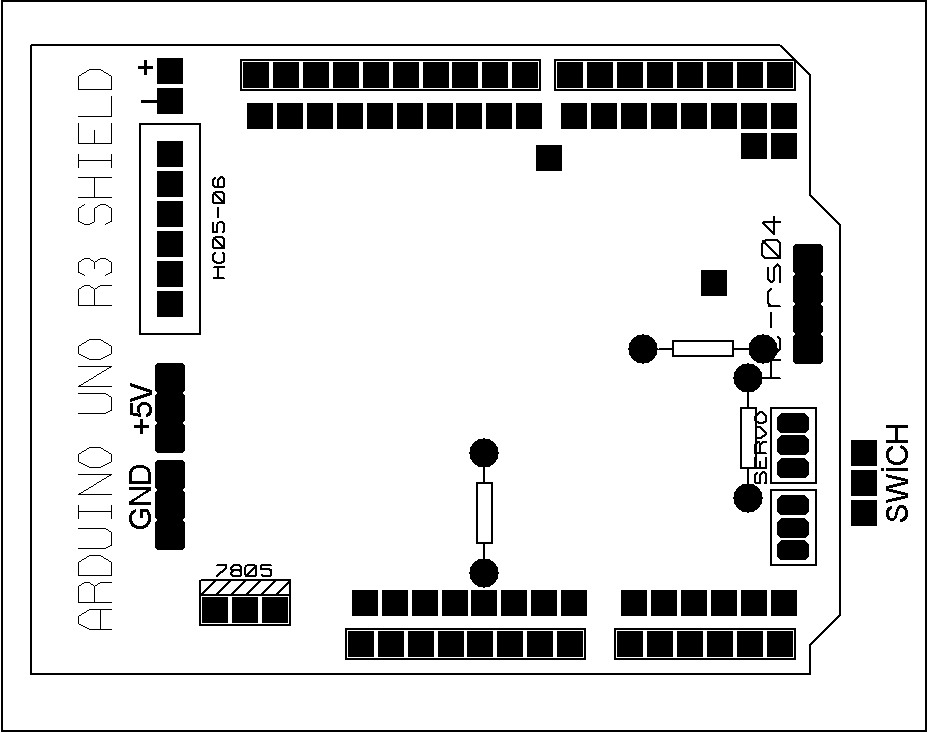
proto_shiedl ares dosyası
One response
学无止境,认真拜读!