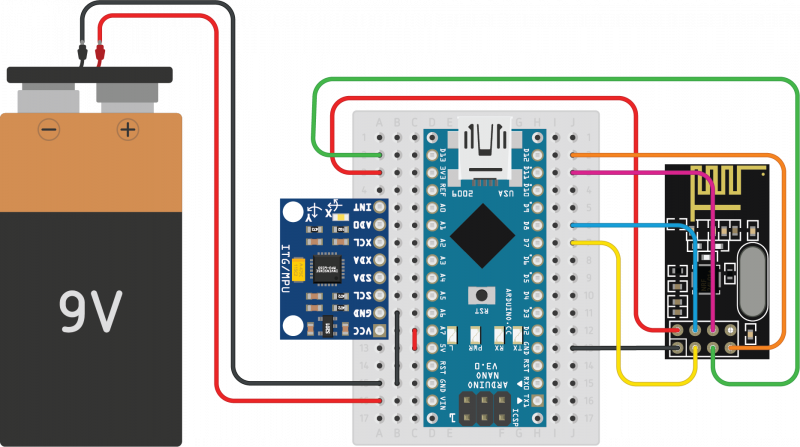
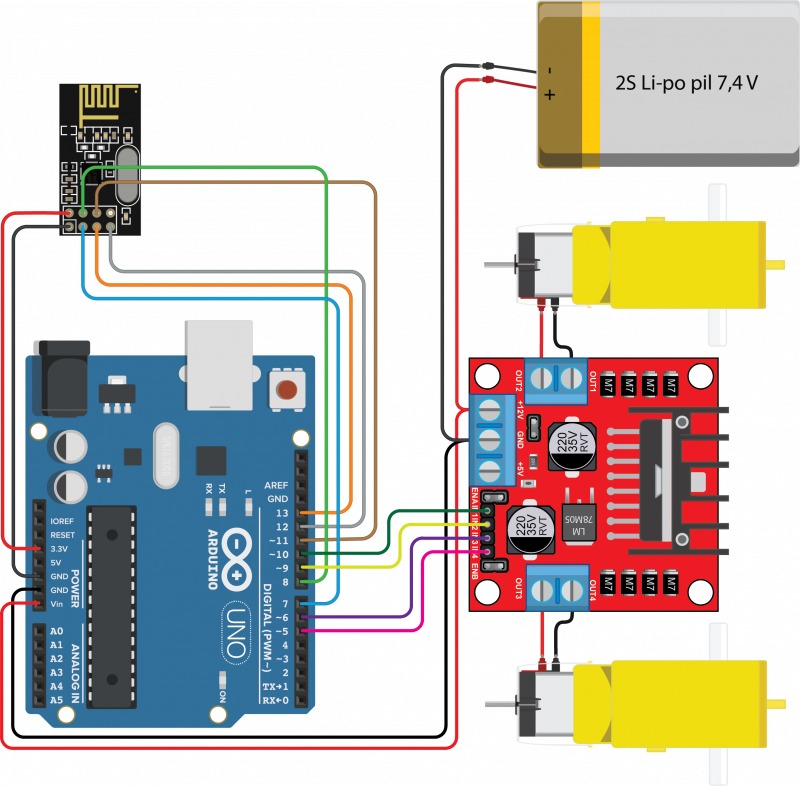
Görseldeki eldiven üzerine yerleştirilmiş verici devresi görülmektedir. Görseldeki vericide kullanılan MPU6050 sensörü küçük deney borduna SDA pini A4, SCL pini A5’e gelecek şekilde takılmıştır. Görseldeki alıcı devresinde nRF24L01+ modül kullanılarak kablosuz iletişim uygulaması yapılmıştır. nRF24L01+ modülü Arduino ile haberleşirken SPI protokolünü, MPU6050 ivme sensörü I2C protokolünü kullanmaktadır. İvme sensörünün x ve y ekseninde -16384 ile 16384 arasında ürettiği değerler map() foksiyonuyla -255 ile 255 arası değerlere dönüştürülerek alıcıya gönderilir. Alıcıda negatif değerler “-“ ile çarpılarak pozitif değer PWM olarak geri ve sağ dönüşe uygulanır.

#include <SPI.h> // nRF24L01+ ile SPI iletişim.
#include <RF24.h> // v1.4.2
#include <Wire.h> // Mpu6050 ile I2C iletişim.
#include <MPU6050.h> //Mpu6050 kütüphanesi v0.3.0
MPU6050 ivme_sensor; // ivme_sensor isimli nesne oluştur.
int x, y, z; // x, y, z düzlemlerinin ivme değişkenleri.
RF24 radio(7, 8); // radio isimli nesne oluştur. CE ve CSN pinleri.
int veri[2]; // X ve y düzlemi için dizi tanımlama.
void setup() {
Wire.begin(); // I2C iletişimi başlat.
ivme_sensor.initialize(); // Mpu6050'yi başlat.
Serial.begin(9600); // Hataları seri monitörde görebilmek için seri iletişimi başlat.
if (!radio.begin()) { // nRF24L01+'yı başlat.
Serial.println("nRF24L01+ bağlantıları yanlış veya temazsızlık var. nRF24L01+ bozulmuş olabilir."); //nRF24L01+ modülü başlamıyorsa uyarı ver.
while (1) {}
}
radio.openWritingPipe(1234); // İletişim anahtarı 1234.
}
void loop() {
ivme_sensor.getAcceleration(&x, &y, &z); // Sensörden ivme bilgilerini al.
veri[0] = map(x, -16384, 16384, -255, 255 ); //X düzleminin verisi (Geri-İleri)
veri[1] = map(y, -16384, 16384, -255, 255); //Y düzeleminin verisi (Sağ-Sol)
radio.write(&veri, sizeof(veri)); // veri değişkenindeki bilgiyi nRF24L01+'ya gönder.
}
#include <SPI.h> // nRF24L01+ ile SPI iletişim.
#include <RF24.h> // v1.4.2
RF24 radio(7, 8); // radio isimli nesne oluştur. CE ve CSN pinleri.
int veri[2];// X ve Y düzlemi için dizi tanımlama
const byte IN1 = 5, IN2 = 6, IN3 = 9, IN4 = 10; // PWM pinleri. (enA ve enB'de jumper takılı).
void setup() {
Serial.begin(9600); // Hataları seri monitörde görebilmek için seri iletişimi başlat.
if (!radio.begin()) { // nRF24L01+'yı başlat.
Serial.println("nRF24L01+ bağlantıları yanlış veya nRF24L01+ bozulmuş olabilir."); //nRF24L01+ modülü başlamıyorsa uyarı ver.
while (1) {}
}
radio.openReadingPipe(0, 1234); // İletişim anahtarı 1234.
radio.startListening(); // Alıcı moda geç.
}
void loop() {
if (radio.available()) { // Veri geliyorsa...
radio.read(&veri, sizeof(veri)); // Gelen veriyi veri değişkenine yükle.
if (veri[0] > 50) { //İleri.
analogWrite(IN1, veri[0]);
analogWrite(IN2, 0);
analogWrite(IN3, veri[0]);
analogWrite(IN4, 0);
}
if (veri[0] < -50) { //Geri.
analogWrite(IN1, 0);
analogWrite(IN2, -veri[0]);
analogWrite(IN3, 0);
analogWrite(IN4, -veri[0]);
}
if (veri[1] > 50) { //Sol.
analogWrite(IN1, 0);
analogWrite(IN2, veri[1]);
analogWrite(IN3, veri[1]);
analogWrite(IN4, 0);
}
if (veri[1] < -50) { // Sağ.
analogWrite(IN1, -veri[1]);
analogWrite(IN2, 0);
analogWrite(IN3, 0);
analogWrite(IN4, -veri[1]);
}
if (veri[0] > -50 && veri[0] < 50 && veri[1] > -50 && veri[1] < 50) { // Dur.
analogWrite(IN1, 0);
analogWrite(IN2, 0);
analogWrite(IN3, 0);
analogWrite(IN4, 0);
}
}
}
#include <SPI.h> // nRF24L01+ ile SPI iletişim.
#include <RF24.h> // v1.4.2
RF24 radio(7, 8); // radio isimli nesne oluştur. CE ve CSN pinleri.
byte solPwm, sagPwm;
int veri[2];// X ve Y düzlemi için dizi tanımlama
const byte IN1 = 5, IN2 = 6, IN3 = 9, IN4 = 10; // PWM pinleri. (enA ve enB'de jumper takılı).
// IN1, IN2 sol tekerlek, IN3, IN4 sağ tekerlek.
void setup() {
Serial.begin(9600); // Hataları seri monitörde görebilmek için seri iletişimi başlat.
if (!radio.begin()) { // nRF24L01+'yı başlat.
Serial.println("nRF24L01+ bağlantıları yanlış veya nRF24L01+ bozulmuş olabilir."); //nRF24L01+ modülü başlamıyorsa uyarı ver.
while (1) {}
}
radio.openReadingPipe(0, 1234); // İletişim anahtarı 1234.
radio.startListening(); // Alıcı moda geç.
}
void loop() {
if (radio.available()) { // Veri geliyorsa...
radio.read(&veri, sizeof(veri)); // Gelen veriyi veri değişkenine yükle.
int x = veri[0]; // x'in içeriği -255 ile 255 arasında değişmektedir. (Geri-İleri)
int y = veri[1]; // y'in içeriği -255 ile 255 arasında değişmektedir. (Sağ-Sol)
if (y > 0) { // y pozitif ise sola dön
sagPwm = x;
if (x > y / 3)
solPwm = x - y / 3;
}
else { // y negatif ise sağa dön
solPwm = x;
if (x > -(y / 3))
sagPwm = x + y / 3; // Sağda y negatiftir.
}
if (x > 50) { // İleri yönler.
analogWrite(IN1, solPwm);
analogWrite(IN2, 0);
analogWrite(IN3, sagPwm);
analogWrite(IN4, 0);
}
if (x < -50) { // Geri yönler.
analogWrite(IN1, 0);
analogWrite(IN2, 255 - solPwm);
analogWrite(IN3, 0);
analogWrite(IN4, 255 - sagPwm);
}
if (x > -50 && x < 50 && y > -50 && y < 50) { // Dur.
analogWrite(IN1, 0);
analogWrite(IN2, 0);
analogWrite(IN3, 0);
analogWrite(IN4, 0);
}
}
}
#include <SPI.h> // nRF24L01+ ile SPI iletişim.
#include <RF24.h> // v1.4.2
RF24 radio(7, 8); // radio isimli nesne oluştur. CE ve CSN pinleri.
int veri[3];// X ve Y düzlemi için dizi tanımlama
const byte IN1 = 5, IN2 = 6, IN3 = 9, IN4 = 10; // PWM pinleri. (enA ve enB'de jumper takılı).
const byte buzzer = 4;
void setup() {
Serial.begin(9600); // Hataları seri monitörde görebilmek için seri iletişimi başlat.
if (!radio.begin()) { // nRF24L01+'yı başlat.
Serial.println("nRF24L01+ bağlantıları yanlış veya nRF24L01+ bozulmuş olabilir."); //nRF24L01+ modülü başlamıyorsa uyarı ver.
while (1) {}
}
radio.openReadingPipe(0, 1234); // İletişim anahtarı 1234.
radio.startListening(); // Alıcı moda geç.
pinMode(buzzer, OUTPUT); // Buzzer pin.
}
void loop() {
if (radio.available()) { // Veri geliyorsa...
radio.read(&veri, sizeof(veri)); // Gelen veriyi veri değişkenine yükle.
if (veri[0] > 50) { //İleri.
analogWrite(IN1, veri[0]);
analogWrite(IN2, 0);
analogWrite(IN3, veri[0]);
analogWrite(IN4, 0);
}
if (veri[0] < -50) { //Geri.
analogWrite(IN1, 0);
analogWrite(IN2, -veri[0]);
analogWrite(IN3, 0);
analogWrite(IN4, -veri[0]);
}
if (veri[1] > 50) { //Sol.
analogWrite(IN1, 0);
analogWrite(IN2, veri[1]);
analogWrite(IN3, veri[1]);
analogWrite(IN4, 0);
}
if (veri[1] < -50) { // Sağ.
analogWrite(IN1, -veri[1]);
analogWrite(IN2, 0);
analogWrite(IN3, 0);
analogWrite(IN4, -veri[1]);
}
if (veri[0] > -50 && veri[0] < 50 && veri[1] > -50 && veri[1] < 50) { // Dur.
analogWrite(IN1, 0);
analogWrite(IN2, 0);
analogWrite(IN3, 0);
analogWrite(IN4, 0);
}
if (veri[2] > 16000) {
digitalWrite(buzzer, HIGH); // Korna çal.
delay(200);
}
else
digitalWrite(buzzer, LOW); // Korna durdur.
}
}
#include <SPI.h> // nRF24L01+ ile SPI iletişim.
#include <RF24.h> // v1.4.2
#include <Wire.h> // Mpu6050 ile I2C iletişim.
#include <MPU6050.h> //Mpu6050 kütüphanesi v0.3.0
MPU6050 ivme_sensor; // ivme_sensor isimli nesne oluştur.
int ax, ay, az, gx, gy, gz; // x, y, z düzlemlerinin ivme değişkenleri.
RF24 radio(7, 8); // radio isimli nesne oluştur. CE ve CSN pinleri.
int veri[3]; // X ve y düzlemi için dizi tanımlama.
void setup() {
Wire.begin(); // I2C iletişimi başlat.
ivme_sensor.initialize(); // Mpu6050'yi başlat.
Serial.begin(9600); // Hataları seri monitörde görebilmek için seri iletişimi başlat.
if (!radio.begin()) { // nRF24L01+'yı başlat.
Serial.println("nRF24L01+ bağlantıları yanlış veya temazsızlık var. nRF24L01+ bozulmuş olabilir."); //nRF24L01+ modülü başlamıyorsa uyarı ver.
while (1) {}
}
radio.openWritingPipe(1234); // İletişim anahtarı 1234.
}
void loop() {
ivme_sensor.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); // Sensörden ivme bilgilerini al.
veri[0] = map(ax, -17000, 17000, -255, 255 ); //X düzleminin verisi (ileri-geri)
veri[1] = map(ay, -17000, 17000, -255, 255); //Y düzleminin verisi (sağ-sol)
veri[2] = gx;
radio.write(&veri, sizeof(veri)); // veri değişkenindeki bilgiyi nRF24L01+'ya gönder.
}
#include <SPI.h> // nRF24L01+ ile SPI iletişim.
#include <RF24.h> // v1.4.2
#include <Wire.h> // Mpu6050 ile I2C iletişim.
#include <MPU6050.h> //Mpu6050 kütüphanesi v0.3.0
MPU6050 ivme_sensor; // ivme_sensor isimli nesne oluştur.
int ax, ay, az, gx, gy, gz; // x, y, z düzlemlerinin ivme değişkenleri.
RF24 radio(7, 8); // radio isimli nesne oluştur. CE ve CSN pinleri.
int veri[3]; // X ve y düzlemi için dizi tanımlama.
void setup() {
Wire.begin(); // I2C iletişimi başlat.
ivme_sensor.initialize(); // Mpu6050'yi başlat.
Serial.begin(9600); // Hataları seri monitörde görebilmek için seri iletişimi başlat.
if (!radio.begin()) { // nRF24L01+'yı başlat.
Serial.println("nRF24L01+ bağlantıları yanlış veya temazsızlık var. nRF24L01+ bozulmuş olabilir."); //nRF24L01+ modülü başlamıyorsa uyarı ver.
while (1) {}
}
radio.openWritingPipe(1234); // İletişim anahtarı 1234.
}
void loop() {
ivme_sensor.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); //.getAcceleration(&x, &y, &z); // Sensörden ivme bilgilerini al.
veri[0] = map(ax, -16384, 16384, -255, 255 ); //X düzleminin verisi (Geri-İleri)
veri[1] = map(ay, -16384, 16384, -255, 255); //Y düzeleminin verisi (Sağ-Sol)
veri[2] = gx;
radio.write(&veri, sizeof(veri)); // veri değişkenindeki bilgiyi nRF24L01+'ya gönder.
Serial.print(ax);
Serial.print(" ");
Serial.println(ay);
}
No responses yet